Building your robot
Start by building the three-wheeled basis following the steps in the booklet that is open on the assembly desks. Start at page 13. You should have available all parts that you need - if not, please ask us.
At the end of this step, your robot should look like on page 21 of the booklet or in other words like this:
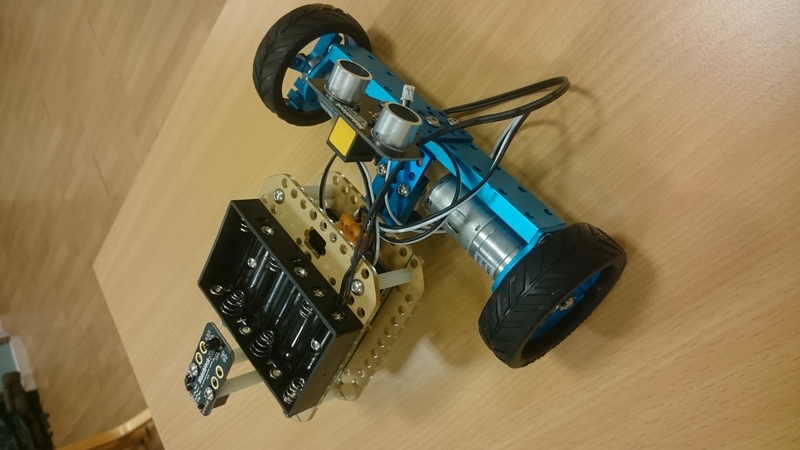
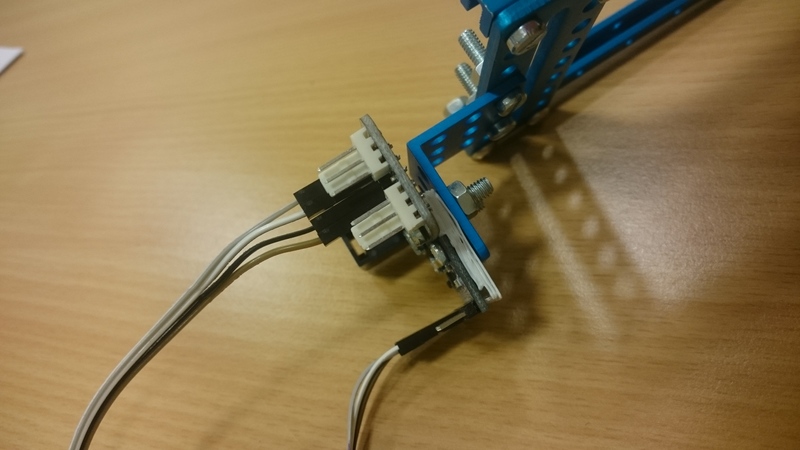
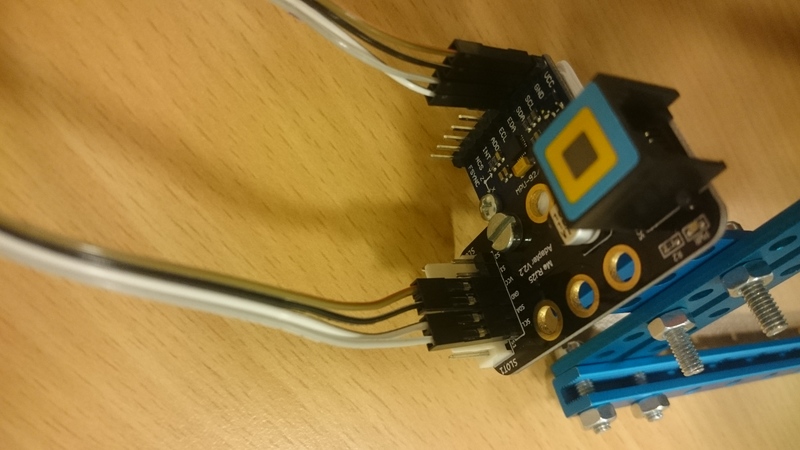
Connect the accelerometer, gyroscope, and compass
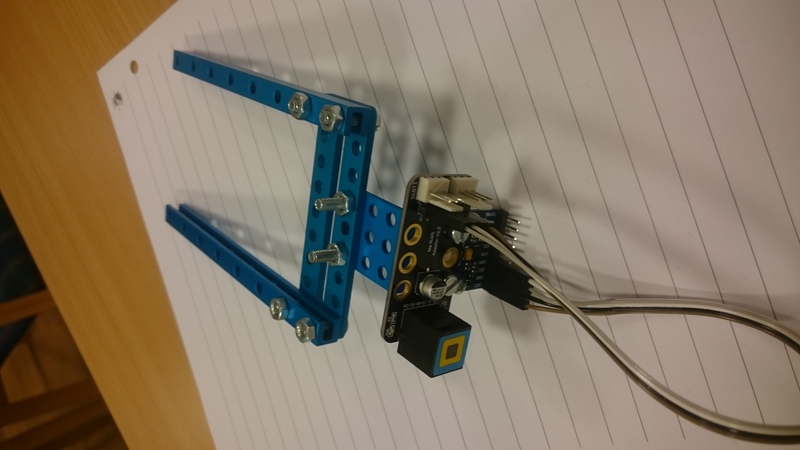
As the next step, build a little platform that holds the accelerometer, gyroscope, and compass. This you will not find in the booklet.
This is how the platform should look:
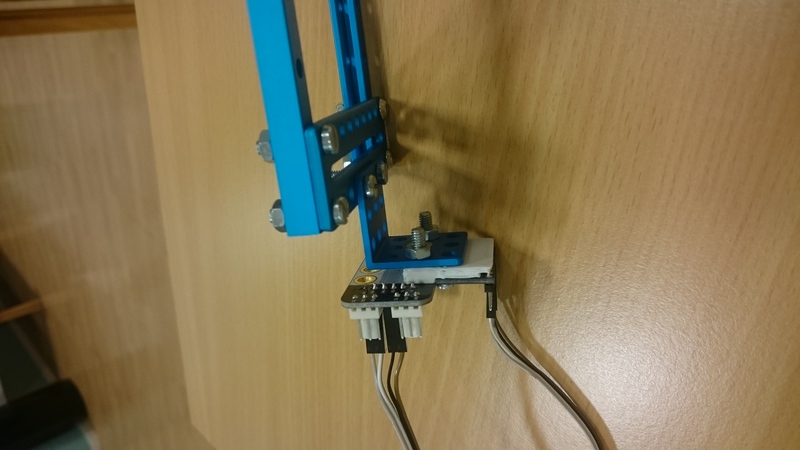
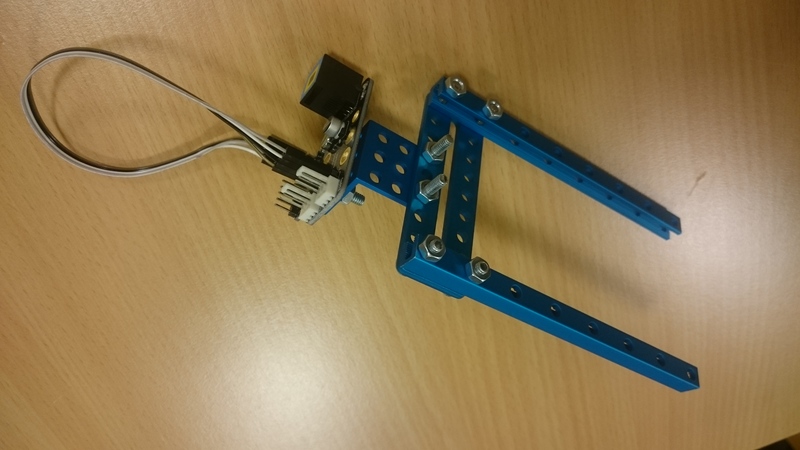
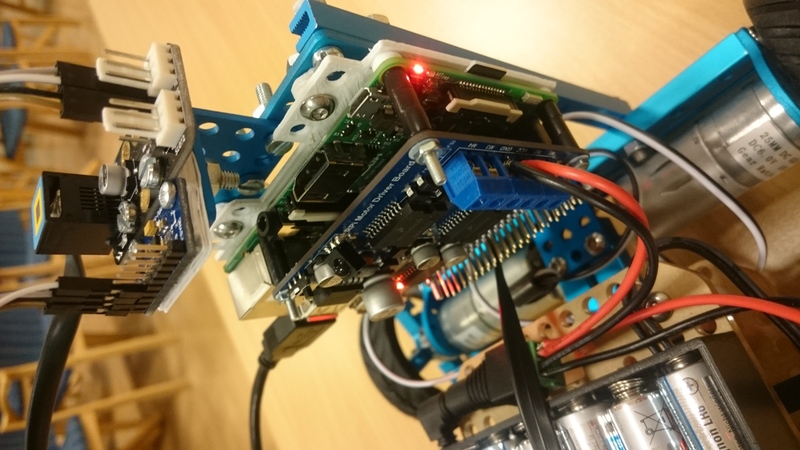
Once you connect it to the robot, it should look like this:
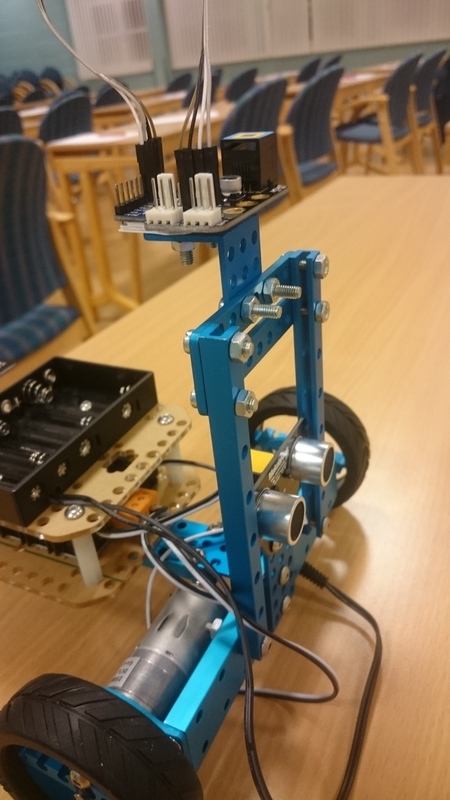
We want the platform high up to leave room for the Raspberry Pi.
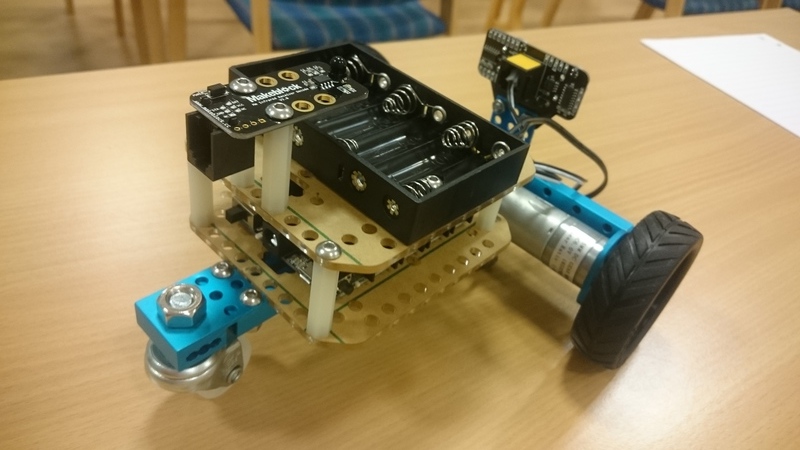
Connect the Raspberry Pi 3
Now connect the Raspberry Pi with 2 screws on the top - note the distance rings in between the Raspberry Pi plate and the blue structure:
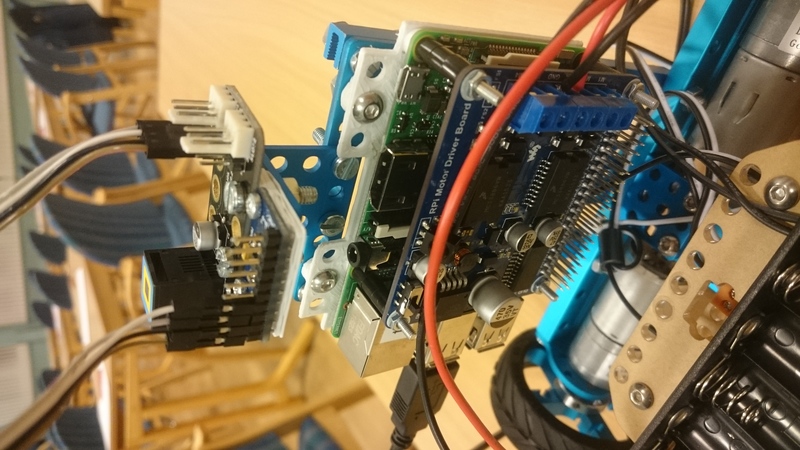
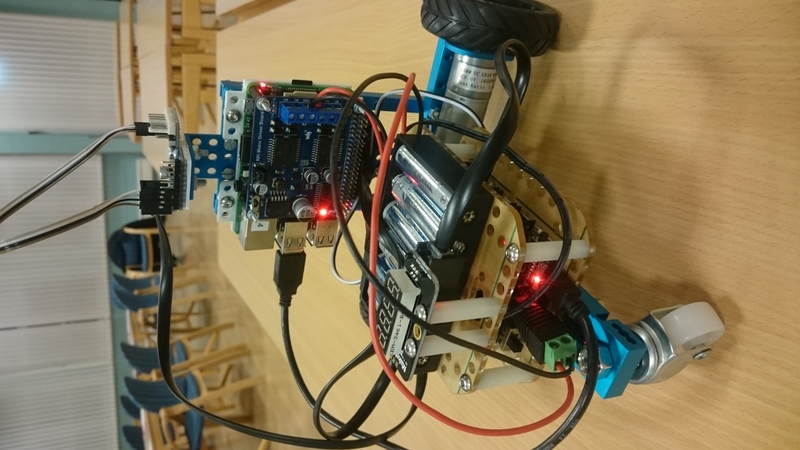
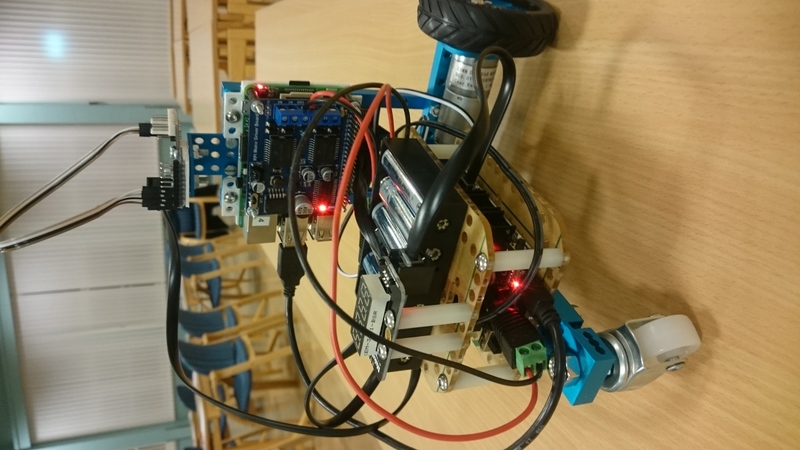
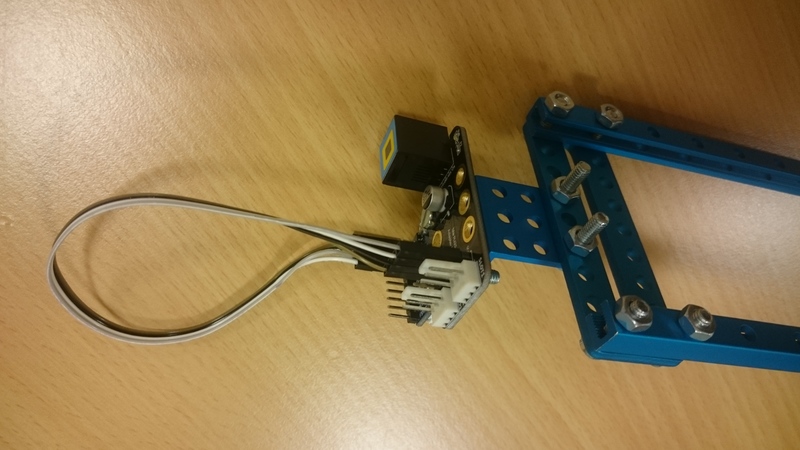
Connect all cables
Make sure you connect all cables. Hopefully you can deduce the connections from the following photos but do not hesitate to ask us: